
Calculating Position from Raw GPS Data
We are all familiar with GPS (Global Positioning System) and its myriad applications. From getting directions using Google maps to hailing a ride using a ride sharing […]
We are all familiar with GPS (Global Positioning System) and its myriad applications. From getting directions using Google maps to hailing a ride using a ride sharing […]
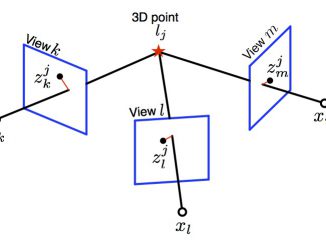
In this post, we’ll add the math and provide implementation for adding image based measurements. Let’s recap the notation and geometry first introduced in part […]
In the previous posts, we laid the mathematical foundation necessary for implementing the error state kalman filter. In this post, we’ll provide the Matlab implementation […]
In the previous post, we laid some of the mathematical foundation behind the kalman filter. In this post, we’ll look at our first concrete example […]
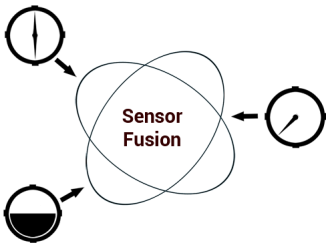
In this series of posts, I’ll provide the mathematical derivations, implementation details and my own insights for the sensor fusion algorithm described in 1. This paper describes a […]
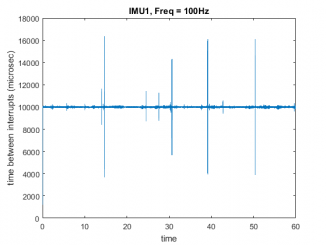
In this post, I’ll describe the lessons learnt from trying to sample IMU sensors to obtain raw gyroscope and accelerometer data as input to sensor […]
In the last post, we applied bundle adjustment to optimize camera intrinsic and extrinsic parameters keeping the position of the object points fixed. In this […]
In the previous posts we considered how to calculate the Jacobians for Bundle Adjustment (BA) and their relative magnitudes and some of their properties. In […]
In the previous post, we considered the basics of bundle adjustment (BA) and discussed how to obtain the expressions for the jacobian matrices for the […]
Bundle Adjustment (BA) is a well established technique in Computer Vision typically used as the last step in many feature based 3D reconstruction algorithms to […]
Copyright © 2026 | WordPress Theme by MH Themes