
Efficiently Computing the Fisher Vector Product in TRPO
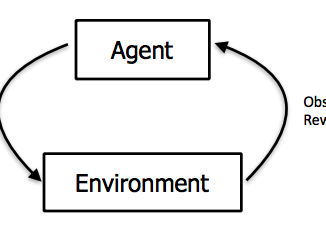
The purpose of this post is to provide math proofs and clarify some implementation details in the recently introduced reinforcement learning method called “Trust Region […]
The purpose of this post is to provide math proofs and clarify some implementation details in the recently introduced reinforcement learning method called “Trust Region […]
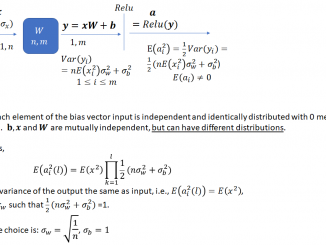
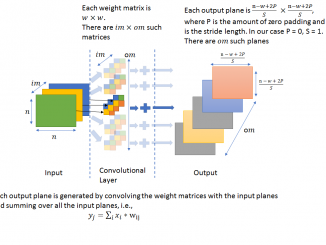
You may have noticed that weights for convolutional and fully connected layers in a deep neural network (DNN) are initialized in a specific way. For […]
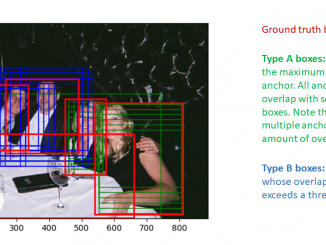
In this post, I’ll describe in detail how R-CNN (Regions with CNN features), a recently introduced deep learning based object detection and classification method works. R-CNN’s […]
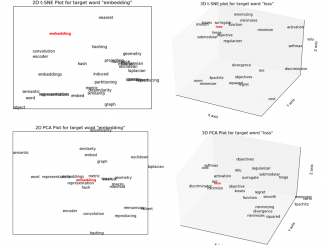
In this post, I’ll describe some experiments on word2vec, a technique invented by researchers at Google that aims to find compact vector representations for words […]
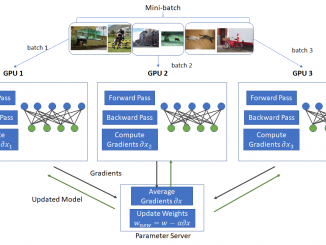
In this post, I’ll show how to modify the spiral data set example presented in Karpathy’s post (http://cs231n.github.io/neural-networks-case-study/) to run in a data parallel mode. […]
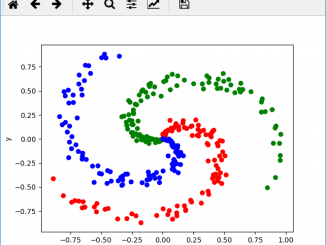
The purpose of this post is to provide some additional insights and Matlab and CNTK implementations for the two layer network used to classify a […]
Over the last month, I have been exploring the world of deep learning. Deep learning based algorithms have been around for a long time, but […]
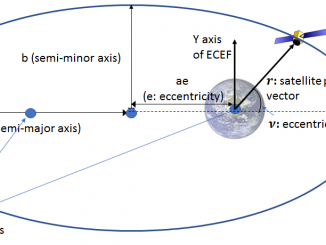
We are all familiar with GPS (Global Positioning System) and its myriad applications. From getting directions using Google maps to hailing a ride using a ride sharing […]
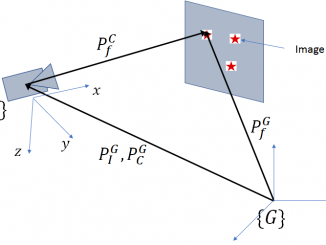
In this post, we’ll add the math and provide implementation for adding image based measurements. Let’s recap the notation and geometry first introduced in part […]
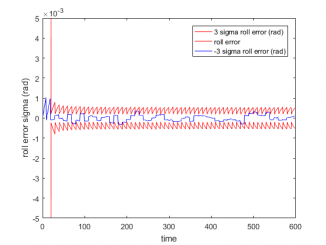
In the previous posts, we laid the mathematical foundation necessary for implementing the error state kalman filter. In this post, we’ll provide the Matlab implementation […]
Copyright © 2025 | WordPress Theme by MH Themes