
Sensor Fusion: Part 4
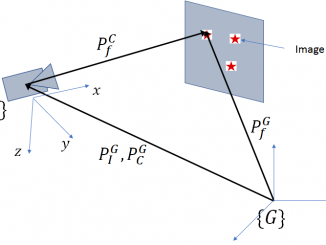
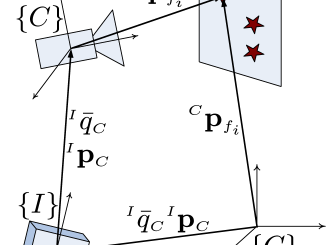
In this post, we’ll add the math and provide implementation for adding image based measurements. Let’s recap the notation and geometry first introduced in part […]
In this post, we’ll add the math and provide implementation for adding image based measurements. Let’s recap the notation and geometry first introduced in part […]
In the previous posts, we laid the mathematical foundation necessary for implementing the error state kalman filter. In this post, we’ll provide the Matlab implementation […]
In the previous post, we laid some of the mathematical foundation behind the kalman filter. In this post, we’ll look at our first concrete example […]
In this series of posts, I’ll provide the mathematical derivations, implementation details and my own insights for the sensor fusion algorithm described in 1. This paper describes a […]
Copyright © 2026 | WordPress Theme by MH Themes