

Passing the CKAD Exam
I took the Certified Kubernetes Application Developer (CKAD) exam on Feb 4 and passed it with a 75% score. The passing score is 66%. The […]
I took the Certified Kubernetes Application Developer (CKAD) exam on Feb 4 and passed it with a 75% score. The passing score is 66%. The […]

The holidays are typically not a particularly exciting time for me because my family lives far away and I’m usually by myself and holidays this […]

This fall has been full of outdoor activities. I’ve never biked and hiked more than in 2020. Indeed, regular biking and hiking has helped me […]

This year on my birthday, I did the Mary’s Rock hike in Shenandoah with a friend Ruth (who I had met a couple of months […]

Today marked a major milestone in the fight against Covid-19. A UK grandmother become the first person in the world to be given the Pfizer […]
In this post, I’ll show you how to run the Ray application covered in the previous post as a Kubernetes deployment running on a local […]
After many days of vote counting and Trump’s lead in the battleground states of PA, GA slowly shrinking until finally being overtaken by Biden, the […]
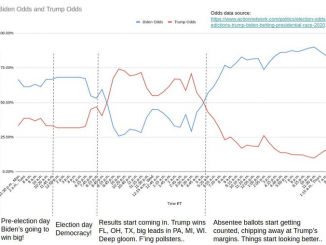
Election day 2020 was yesterday and votes are still being counted. Biden is on track to win 270 electoral votes if he maintains his lead […]
This post shows how to set up a local Ray cluster consisting of several Ubuntu workstations connected over a home WiFi network and running a Directed […]
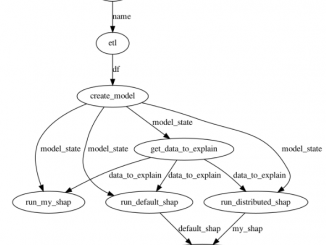
In this post, I will provide the math for eliminating the constraint on the sum of Shap (SHapley Additive exPlanations) values in the KernelSHAP algorithm […]
Copyright © 2024 | WordPress Theme by MH Themes